

Vous êtes ici : LISVFRRechercheRobotique Interactive
- Mis à jour le 21 décembre 2023
- Version PDF
Projet RI - Orthèse Poignet VSA
WO-VSA (Wrist Orthosis using Variable Stiffness Actuators)
This project aims to design a robotic orthosis device for wrist rehabilitation. This orthosis follows the rotation behaviour of the human wrist along 3 degrees of freedom (dof). The particularity of this design is the use of variable stiffness mechanisms allowing for the control of both the equilibrium position and the stiffness value of the 3 dof independently.
Aiming to mobility rehabilitation and muscle reinforcement of post-traumatic patients, the inclusion of stiffness control in this robotic orthosis allows to imagine new methodology in wrist rehabilitation, with capabilities in both static and dynamic reinforcement exercises.
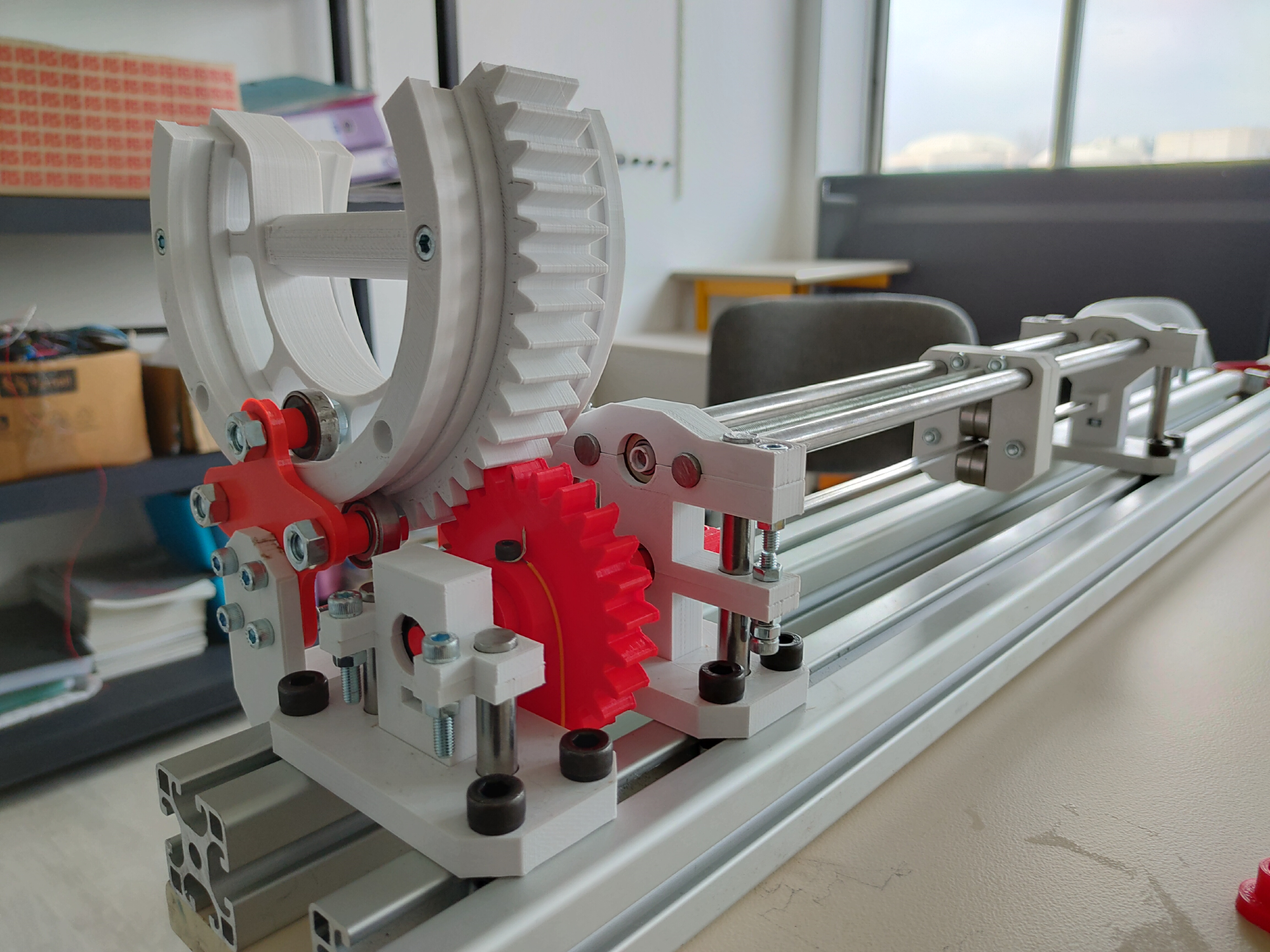
The following figure presents the first step in the design of this orthosis. The stiffness of the prono-supination mobility of the wrist is controlled through a variable stiffness mechanism using a bar in torsion.
Contacts : V. Chalvet (LISV)
Partenaires/Collaboration :
Keywords: orthosis, rehabilitation, variable stiffness actuators
Soutiens :
Lien vidéo :
Lien :