

- Mis à jour le 22 juin 2023
- Version PDF
Projet8 - Master2 CSER 2015
Design of a test-bench based on LabVIEW for of a humanoid robot equipped with infrared sensors on its feet
This project is situated within the framework of the development of the sensory envelop for humanoid biped robot. The objective is the use of all sensors information to improve the robot control.
This project will allow us to know the position and orientation of the foot of the robot in real time thanks to four infrared sensors placed under this foot.
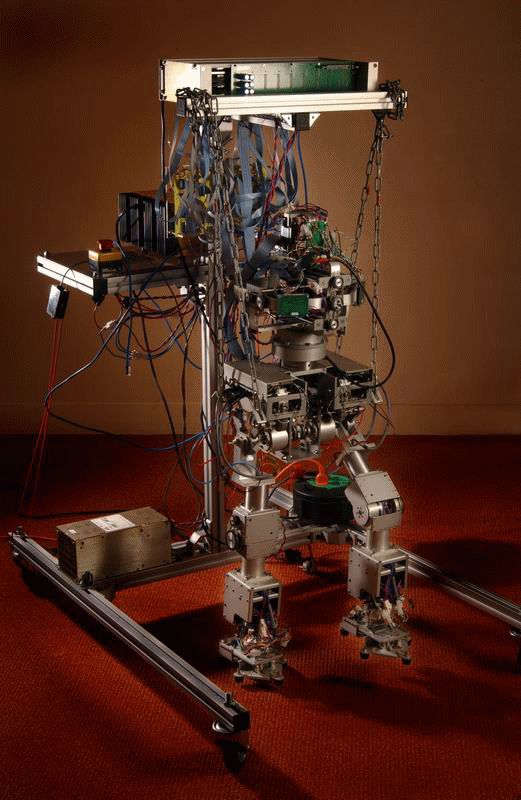
A first work has allowed to get back the global position (height and angles) of the foot of a humanoid robot when the foot does not move from the information feedback of four infrared sensors.
One of the objectives of this project consists in expend this work to dynamic movements of the foot.
It is thus necessary to design a test bench to generate dynamical behaviors by means of electrical actuators.
One of the objectives of this project consists in expend this work to dynamic movements of the foot.
It is thus necessary to design a test bench to generate dynamical behaviors by means of electrical actuators.
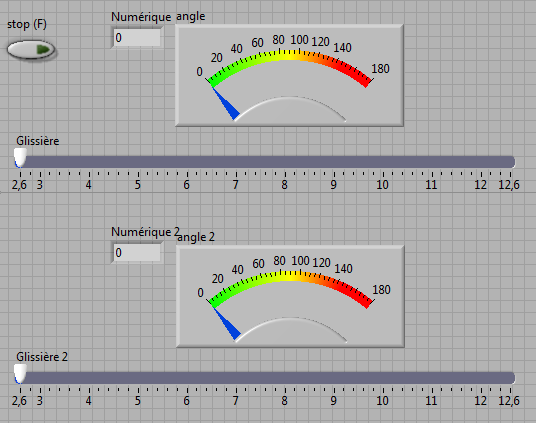
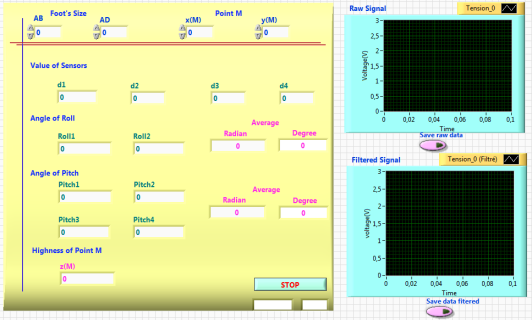
This project is based on the LabVIEW interface which will allow us to propose a reference trajectory for the foot (isolated from the robot) and to get back the real position using the infrared sensors.
It will be necessary to optimize the programming to have a better signal processing.
Contact : Nelly Nadjar-Gauthier, Maître de Conférences LISV/UVSQ, gauthier@lisv.uvsq.fr