

Vous êtes ici : LISVFRRechercheRobotique Interactive
- Partager cette page :
- Version PDF
Présentation RI
Etude des Systèmes Robotisés Interactifs d’Assistance et de Service : Assister l’usager, intégrer l’humain dans la boucle d’interaction, conception de systèmes d’assistance, évaluation de l’assistance.
Notre problématique s’inscrit dans la thématique de l’interaction humain/machine (IHM), depuis le processus de conception jusqu’aux étapes d’évaluation d’usage du système d’assistance.
L’objectif est de favoriser la mise au point de méthodes d’analyses, du niveau signal au niveau système, pour l’évaluation et la conception de dispositifs expérimentaux adaptés.
- Comprendre/Evaluer/Percevoir les signaux et mécanismes de l’IHM (identifier, classifier, modéliser) liés à l’interaction (du niveau physiologique, biomécanique/analyse de posture, émotionnelle et décisionnel, comportement),
- Définition des outils d’évaluation intégrant des méthodes d’analyse et de classification objectives (techniques de machine learning et de deep learning aux variétés matricielles adéquates),
- Conception de systèmes d’aide à la mobilité, de rééducation et de compensation intégrant la modélisation/contrôle/décision (mise en œuvre des techniques haptique, contrôle d’impédance, transparence, compensation/amplification, sécurisation, ..),
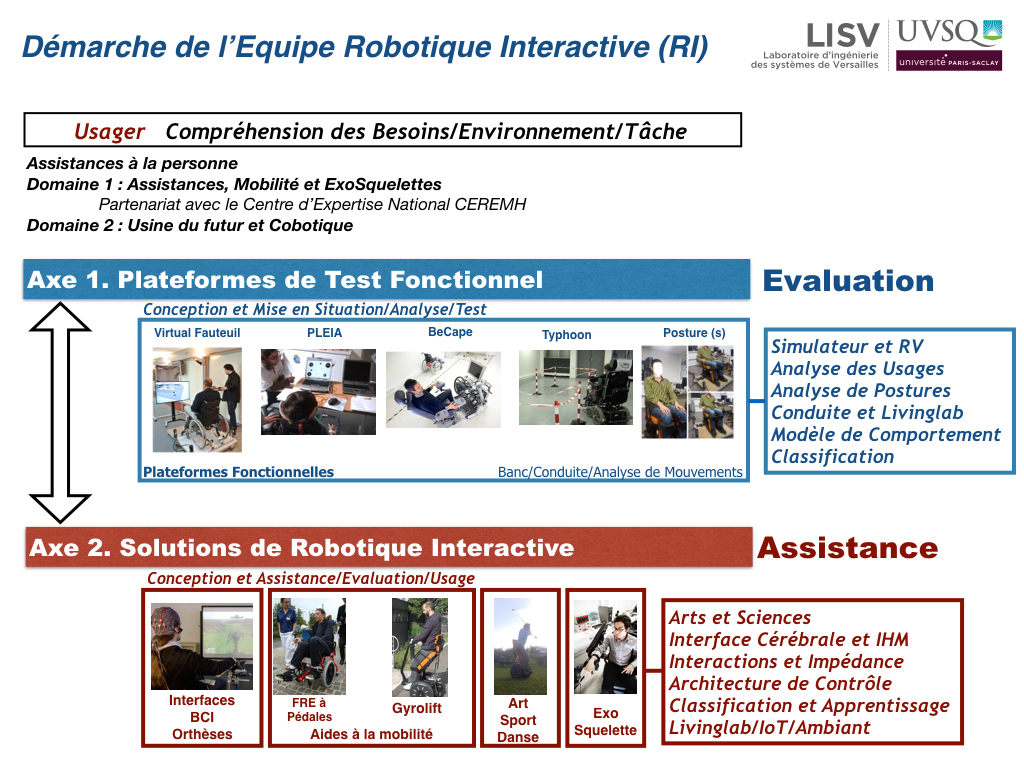
Plusieurs Contextes applicatifs : Handicap, Mobilité, Sensibilisation et Arts/Sciences, Construction et Industrie du futur
Mots Clefs : Robotique d’assistance, Capteurs intelligents, Perception et Traitements/Classification Automatique et architecture de contrôle, Modélisation de l’interaction, Humain & Robot, Conception des Solutions d’interaction, Adaptation du contrôle, Assistance, Partage de décision
Plateformes Expérimentales :
Orthèse/Prothèse, ExoSquelette, Aide Mobile, Déambulateur/Fauteuil Roulant, Simulateur RV, Serious Game/Exergame, EEG/BCI, Capteurs pour la mobilité, …
Membres
Animateur :
Abderraouf Benali (PR60)
Abderraouf Benali (PR60)
Patrick Bonnin (PR61)
Vincent Chalvet (MCF60)
Stéphane Delaplace (PR61)
Halim Djerroud (MCF61)
Eric Monacelli (PR61)
Nelly Nadjar-Gauthier (MCF61)
Olivier Rabreau (IR)
Fethi BenOuezdou (PR61) - détachement ENSTA
Abderraouf Benali (PR60)
Abderraouf Benali (PR60)
Patrick Bonnin (PR61)
Vincent Chalvet (MCF60)
Stéphane Delaplace (PR61)
Halim Djerroud (MCF61)
Eric Monacelli (PR61)
Nelly Nadjar-Gauthier (MCF61)
Olivier Rabreau (IR)
Fethi BenOuezdou (PR61) - détachement ENSTA
Projets
International
Afrique du Sud (FSATI, TUT et CUT univ.)
Canada (McGill univ., Université Laval et Manitoba univ. )
Japon (Tohoku univ)
Koweit (American University of the Middle East)
Liban (UL)
Pérou (PUCP)
Canada (McGill univ., Université Laval et Manitoba univ. )
Japon (Tohoku univ)
Koweit (American University of the Middle East)
Liban (UL)
Pérou (PUCP)